Velev Group Develops Programmable Microbots
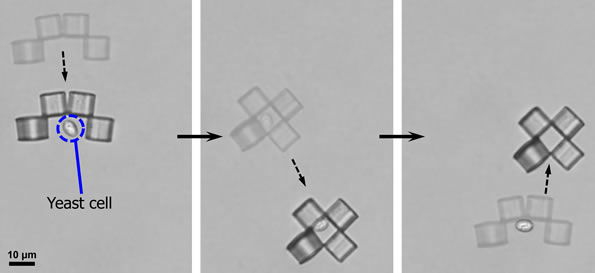
Members of Professor Orlin Velev’s research group and their colleagues at Duke University have developed a way to assemble and pre-program tiny structures made from microscopic cubes – “microbot origami” – that change their shape when actuated by a magnetic field and then use the magnetic energy to perform a variety of tasks – including capturing and transporting single cells.
The research results pave the way for microbots and micro-origami assemblies that can serve as cell characterization tools, fluid micromixers, and components of artificial muscles and soft biomimetic devices.
“This research is about a topic of current interest – active particles which take energy from their environment and convert it into directional movement,” said Dr. Velev, a co-corresponding author of the paper.
To create the microbot origami, the researchers start with microscopic polymer cubes that are metallic on one side, essentially allowing the metallic side to act as a magnet. Depending on their positioning, the cubes can be assembled in many different ways.
“Since they are magnetized and interacting, the cubes store energy,” Velev said. “Tiny particles in the shape of cubes can attach together in sequences where they face in different directions to make, for example, clusters that behave like a tiny Pac-Man: You can open them by applying a magnetic field and then let them close by turning the magnetic field off. They close because they are releasing the stored magnetic energy. Thus, you inject internal energy every time you open the microclusters and release it when they close.”
“We’ve shown here a prototype of self-folding microbot,” Velev said, “that can be used as a microtool to probe the response of specific types of cells, like cancer cells, for instance.”
“Previously reported microrobotic structures have been limited to performing simple tasks such as pushing and penetrating objects due to their rigid bodies. The ability to remotely control the dynamic reconfiguration of our microbot creates a new ‘toolbox’ for manipulating microscale objects and interacting with its microenvironment,” said Koohee Han, a Ph.D. candidate in Dr. Velev’s group and first author of the research paper that describes the work.
“As the microbot folds, it can compress liquids or solids and you can use it as a tool to measure bulk mechanical properties, like stiffness,” said Wyatt Shields, a postdoctoral researcher at Duke University and NC State University who co-authored the paper. “In some ways, it is a new metrological tool for gauging elasticity at the microscopic level.”
The authors say that the design of microbot origami mimics nature. “The cube sequence programs the shapes of the folding microbots. Proteins work in the same way,” Shields said. “The sequence of amino acids in a protein will determine how it folds, just as the sequence of cubes in our microbot will determine how it folds.”
Velev says that future work will concentrate on making the particles move on their own, rather than steering them with magnetic fields. Han is working on making bots that self-propel in complex fluids with non-Newtonian behavior. Shields is studying how the dynamics of the microbot reshaping could be used to study the microstructure of surrounding macromolecules.
The research paper, “Sequence-encoded colloidal origami and microbot assemblies from patchy magnetic cubes”, is co-authored by Bhuvnesh Bharti, presently a faculty member at Louisiana State University; Nidhi M. Diwakar, an REU student at Research Triangle Materials Research Center; and co-corresponding author Gabriel P. López, presently at the University of New Mexico. News about the microbots was reported in a wide range of media, including Wired, Yahoo! News, TechCrunch, ScienceDaily, Phys.org, Chemistry World, C&E News, German National Radio, Newsy and ZD Net.
The research is funded by the National Science Foundation under grant CBET-1604116, by the Research Triangle Materials Research Science and Engineering Center on Programmable Soft Matter under grant DMR-1121107, and by an NSF graduate fellowship (GRF-1106401).
The original article was written by Mick Kulikowski, Assistant Director-News, University Communications at NC State.


